Het (voertuig-) snelheidsignaal van auto’s en lichte bedrijfswagens is al jaren een van de belangrijkste signalen voor aftermarket-systemen zoals cruise-controls, navigatiesystemen, taximeters en telematica die worden ingebouwd nadat het voertuig op kenteken is gezet. Veel van die systemen hebben dat signaal nodig om goed te functioneren, ondanks de beschikbaarheid van goede GPS. In dit stuk kijken we naar de ontwikkeling die het snelheidsignaal door de jaren heen heeft doorgemaakt, van pulsgever via API en CAN-technologie tot aan de nieuwste netwerkprotocollen waar we nu voor staan.
Eind jaren tachtig, toen in Nederland de verkoop van aftermarket cruise-controls en fleetmanagement-systemen voor auto’s en lichte bedrijfswagens op gang kwam, werd de vraag naar een goed snelheidsignaal groter. En die nam zelfs een vlucht in de jaren negentig met de introductie van navigatiesystemen, toen nog niet beschikbaar als stand alone systeem (TomTom) of via een applicatie zoals Google Maps.
Het elektronische snelheidsignaal dat al die systemen nodig hadden, was echter niet altijd in de gewenste vorm beschikbaar in het voertuig, zeker niet als het een wat oudere auto betrof. En als het er al was, was het niet altijd geschikt voor het aftermarket-systeem, of leidde het aftakken ervan soms tot problemen in het voertuig. Hierdoor ontstond er een markt voor pulsgevers, pulsdelers, pulsversterkers en pulsinterfaces.

Tot aan de jaren tachtig hadden veel auto’s en lichte bestelwagens alleen een mechanisch snelheidsignaal. De snelheidsmeter werd mechanisch aangedreven door een zogenaamde kilometertellerkabel die de uitgaande as van de versnellingsbak/differentieel verbond met de snelheidsmeter. De kilometertellerkabel bestond uit een buiten- en een binnenkabel. Als de auto begon te rijden ging de binnenkabel draaien en daarmee sloeg de naald van de snelheidsmeter uit. Het toerental van die binnenkabel nam rechtevenredig toe met een toename van de voertuigsnelheid. Hoe harder de binnenkabel draaide, hoe hoger de snelheid die werd aangegeven op de snelheidsmeter. Ook nu rijden er nog (oudere) voertuigen op de weg met deze techniek. Als je dan een elektronisch snelheidsignaal nodig hebt voor bijvoorbeeld een cruise-control, dan kun je dat op twee manieren realiseren: met een pulsgever of met een magneetopnemer. Pulsgevers, veelal van het type Hall, zetten een mechanische draaiende beweging om in een elektronisch pulssignaal en worden geplaatst aan een van de uiteinden van de kilometertellerkabel. Ook magneetopnemers zetten een mechanische draaiende beweging om in een elektronisch pulssignaal maar doen dat inductief (een spoel i.c.m. magneetjes). Ze werden geplaatst bij een aandrijfas onder de auto. Ik zeg bewust ‘werden’ want vanwege die storingsgevoelige locatie en hun constructie worden ze nauwelijks nog toegepast.
Eind jaren negentig vervingen autofabrikanten de kilometertellerkabel steeds vaker voor een elektronische Hall-gever waardoor het aandeel auto’s met een elektronisch snelheidsignaal snel toenam. Fijn voor de installateurs zou je denken, maar al snel bleek dat dit signaal niet altijd geschikt was om, naast de snelheidsmeter van de auto, ook een aftermarket-systeem aan te sturen. Zo kon het gebeuren dat na de installatie van het systeem de snelheidsmeter van de auto haperde of helemaal niet meer werkte. Ook het aftermarket-systeem kon moeite hebben met de specificaties van het originele snelheidsignaal waardoor het niet naar behoren functioneerde. De roep om een geschikte adapter/interface nam snel toe, wat feitelijk heeft geleidt tot het ontstaan van de R&D-afdeling van Beijer Automotive. Daar werd in rap tempo de Automatische Puls Interface ontwikkeld, kortweg API, die zo’n beetje alle snelheidsignaal-problemen oploste. En dat inmiddels al ruim 20 jaar doet. Tegenwoordig niet meer in die grote getale van toen want de ontwikkelingen in de automotive industrie gingen gewoon door en een nieuwe technologie stond alweer in de startblokken: CAN.

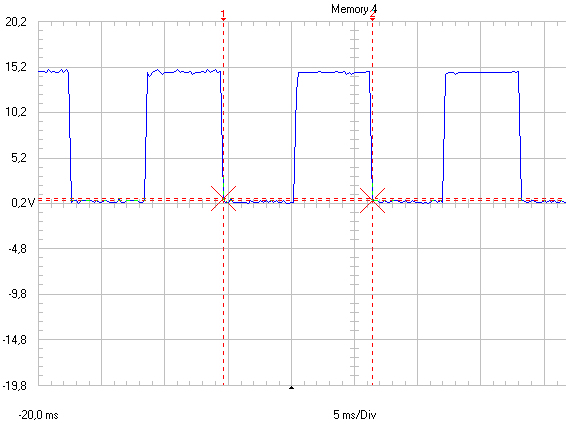
De door Bosch ontwikkelde CAN-technologie (Controller Area Network) werd als eerste toegepast in de Mercedes S-klasse (W140) die in 1991 op de markt kwam. Het was nog maar een klein netwerk, ook wel CAN-bus genoemd, met beperkte functionaliteiten die voor de zekerheid ook nog eens conventioneel werden ondersteund, zoals het snelheidsignaal dat niet alleen op het digitale CAN-netwerk beschikbaar was maar ook analoog of ‘discreet’ zoals het ook wel werd genoemd. Maar de ontwikkelingen gingen hard en niet snel daarna verschenen er auto’s op de markt waarbij alle belangrijke functies in de auto via de CAN-bus werden aangestuurd en signalen niet altijd meer analoog aanwezig waren. Dat gold voor een snelheidsignaal, maar ook voor verlichtingsignalen en zelfs voor een geschakelde voeding die we al sinds de jaren vijftig gewend waren af te takken van het contactslot. En dus konden de R&D engineers van Beijer weer aan de bak om een oplossing te vinden voor al die installateurs van aftermarket systemen die hun vertrouwde analoge snelheidsignaal niet meer konden vinden in die auto’s. Kort daarna werd door Beijer de Bus-to-Signal interface (B2S) geïntroduceerd. Een CAN-interface die, mits aangesloten op de juiste locatie in het voertuig, het CAN-protocol herkende, de data op de CAN-bus las en dit vertaalde naar betrouwbare analoge signalen, zoals een snelheidsignaal. Omdat de B2S de data op de CAN-bus alleen kon lezen en er niet op schreef, werden storingen en foutcodes in de auto voorkomen. Het was de oplossing die installateurs voorzag van een probleemloze installatie van aftermarket-systemen.
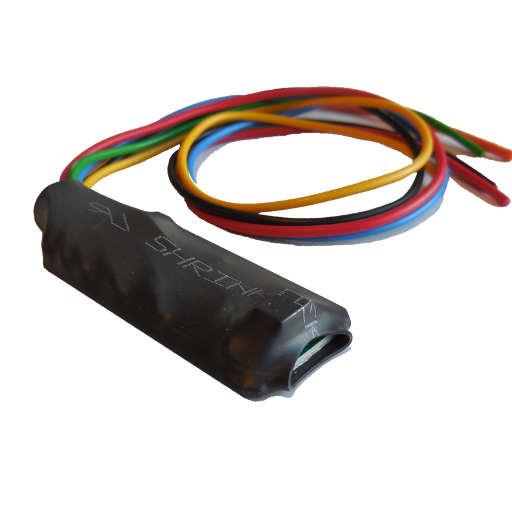
In de loop der jaren nam het aantal auto’s met CAN-technologie zo’n vlucht dat de B2S aan de grenzen van zijn kunnen kwam. Omdat ook de ontwikkeling van chips niet had stilgestaan werd het tijd voor een opvolger: de BCI. Deze alleskunner werd rond 2012-2013 voor het eerst ingezet en is tot op de dag van vandaag misschien wel de meest betrouwbare CAN-interface op de markt. Eén die als refurbished-BCI ook regelmatig voor een tweede leven wordt ingezet.
Niet voor niets gebruikt het Nederlands Meetinstituut (NMi) – een onafhankelijke specialist in testen, inspectie, certificering en training in metrologie – BCI-apparatuur voor combinatietests op automotive aftermarket apparatuur waarbij hoge eisen worden gesteld aan de nauwkeurigheid van snelheidssignalen en betrouwbaarheid onder extreme omstandigheden.
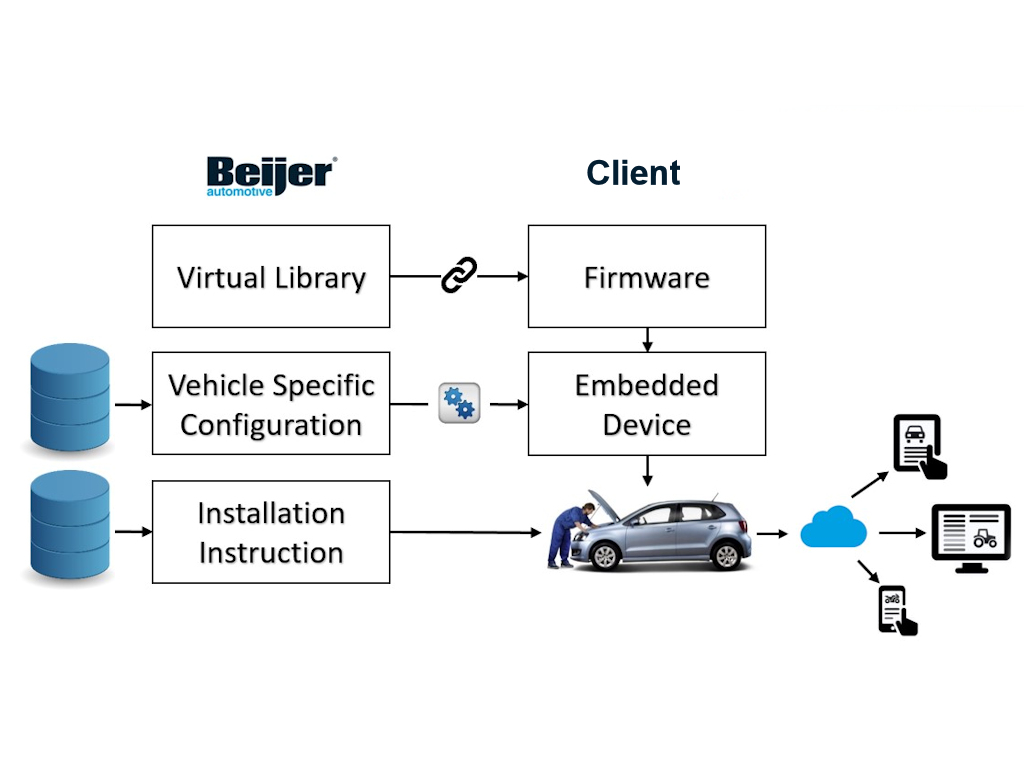
Omdat fabrikanten van auto’s en lichte bedrijfswagens, in tegenstelling tot truckfabrikanten, altijd hun eigen CAN-protocol hanteren en dit zelfs per model kan variëren, heeft de R&D afdeling van Beijer door de jaren heen – door ontelbare metingen – een enorme database opgebouwd. Die data wordt allang niet meer alleen via interfaces verkocht maar ook via een CAN-library die wordt gelinkt aan de software van aftermarket-systeem fabrikanten. Een digitale ‘bibliotheek’ met auto-, motor-, lichte bedrijfswagens-, truck- en landbouwvoertuig-data. Het aftermarket systeem krijgt via de Library toegang tot een grote hoeveelheid voertuiggegevens zoals het snelheidssignaal, motortoerental, verlichtingssignalen, maar bijvoorbeeld ook gegevens over de toestand van de batterij van een elektrisch voertuig. De te installeren telematica, cruise-control of ander systeem kan, zonder tussenkomst van een interface, probleemloos functioneren.
Inmiddels is, in de moderne auto van nu, het CAN-protocol niet meer de standaard. Die rol is overgenomen door snellere- en geavanceerdere protocollen zoals FlexRay, CAN-FD en Ethernet. Een ontwikkeling die jaren geleden werd ingezet en nauwlettend is gevolgd en geïmplementeerd door de R&D van Beijer Automotive. We zijn wederom klaar voor de toekomst!